
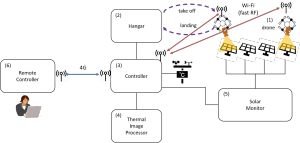
The integrated system consists of the following components: (1) unmanned aerial vehicles (drones) with thermal cameras, (2) drone hangar (charging and storage station), (3) software for coordinating the take off, flight / mission, landing and charging operations of drones, and for communicating with external systems, (4) software for processing the thermal images collected by the drones, and for detecting defects / problems in individual PV cells / modules, (5) software for detecting abnormal operation of PV cells / modules, and (6) software for the remote monitoring and control of the entire system. Based on the prevailing meteorological conditions in the field and information received from (5), (3) decides, plans and coordinates the next mission, and when this is completed it retrieves the thermal images from the drones, and forwards them for processing to (4) together with the operating information of the PV cells / modules received from (5).
The user / administrator receives notifications / information and sets system’s operation parameters, from anywhere on the Internet, through (6). In the spirit of edge computing, thermal image processing is done locally in the PV park so that large volumes of raw data are not sent over costly telecommunication links that have a relatively low transmission speed.
Key project objectives:
- O1: Customization / extension of a drone platform for the aerial capture of IR thermal images of the PV cells / modules of a PV park with the required accuracy / quality and the intelligent conduct of the thermography.
- O2: Automated management of the entire drone operation cycle (take off, flight / mission coordination, landing, data reception, charging, storage) based on the parameters set by the system administrator, taking into account the current weather conditions and operation information of the PV cells / modules.
- O3: Support for multiple drones to cover large PV parks, so as to reduce mission time. For example, to cover a 10 MWatt PV park in an area of 100 acres, 1 drone would have to conduct more than 10 missions, and together with the intermediate recharges it would take 10 hours, while with N drones the total time could be reduced to T / N hours.
- O4: Development and improvement of methods for the estimation of defects and problems of a PV cell / module through IR thermography as well as appropriate correlation of the electrical characteristics and current operation / efficiency with the thermal profiles of the PVs at the level of cells, arrays and panels.
- O5: Integrate the above in a system that will operate automatically, with the least possible human intervention (except for the setting of operating parameters by the system administrator).
- O6: Test / evaluation of the integrated system in a PV park, for a 9-month period of pilot operation.
- O7: Investigation, mainly by the companies, of the best possible exploitation of the technology and the integrated system that will be developed after the end of the project.
